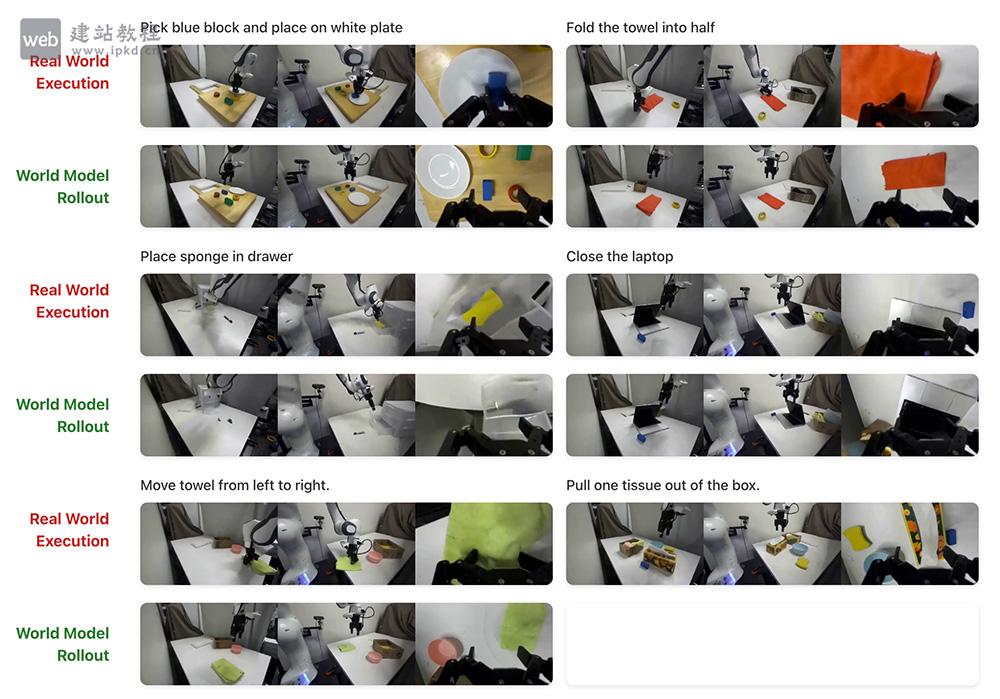
Ctrl-World是清华大学陈建宇团队与斯坦福大学Chelsea Finn团队联合研发的具身世界模型,在WorldArena权威评测中斩获「具身任务能力全球第一」「视频生成质量全球第二」。模型创新性融合动作条件化架构与物理引擎约束,将机械臂动作参数显式注入生成流程,实现厘米级轨迹精度、0.986策略评估一致性及0.93深度准确性,让虚拟测试效果近乎等效于真实测试,为机器人策略训练与评估构建高保真「数字孪生」环境,大幅降低研发成本。
Ctrl-World核心功能:
1、高精度策略评估:
在虚拟环境中完成机器人策略测试,评估结果与真实物理环境一致性达0.986,无需搭建昂贵实体环境即可完成策略验证。
2、可执行动作规划:
基于物理精准的轨迹生成能力,为机器人规划可落地的动作序列,适配闭环控制下的精密操作任务。
3、物理可信数据合成:
生成符合物理规律的视频-动作数据,可直接用于真实机器人策略训练,彻底解决传统合成数据「虚拟有效、真实失效」的痛点。
4、多视图空间感知:
联合生成多视角RGB视频、深度图与点云,为机器人提供完整的3D空间认知能力。
Ctrl-World技术原理:
1、动作条件化架构:
将机器人关节角度、夹爪开合度等物理参数显式注入生成过程,强制学习「动作-状态」的因果物理关联,从根源避免物体穿透、隔空吸附等违背物理规律的错误。
2、物理引擎约束嵌入:
训练阶段引入物理引擎监督,将牛顿力学定律转化为生成硬约束,确保输出结果既视觉真实,又符合质量、摩擦、碰撞等物理守恒规则。
3、记忆增强多视图预测:
通过稀疏历史帧检索+姿态条件化投影保障长时序一致性;同时联合预测多视角RGB、深度图与点云,实现厘米级轨迹精度与精准3D空间认知。
Ctrl-World应用场景:
1、虚拟仿真测试:
直接在Ctrl-World中完成机器人策略性能评估,替代昂贵的真实物理环境,大幅降低研发成本与周期。
2、策略训练数据合成:
生成物理可信的视频-动作序列,解决真实数据采集成本高、效率低的问题,直接赋能真实机器人策略训练。
3、动作规划与闭环控制:
为机械臂生成精准动作序列,支持抓取、堆叠、插入等精密操作,可根据实时反馈动态调整动作规划。
4、机器人技能学习:
生成多样化场景与物体交互数据,帮助机器人学习泛化性强的操作技能,适配未知物体形状、空间位置与任务指令。
相关阅读文章
EdgeClaw AI智能体框架使用入口,面壁智能联合清华、OpenBMB等机构推出的开源AI智能体框架
OpenMAIC官网使用入口,清华THU MAIC研发的开源AI互动教育平台
OpenMAIC官网使用入口,清华团队开源的多智能体AI课堂平台
Kairos 3.0-4B模型使用入口,大晓机器人开源的具身原生世界模型
DreamID-Omni虚拟数字人模型,清华 × 字节跳动统一可控以人为中心音视频生成框架
上面是“Ctrl-World模型使用入口,厘米级轨迹精度、0.986的策略评估一致性及0.93的深度准确性”的全面内容,想了解更多关于 AI项目和框架 内容,请继续关注web建站教程。
当前网址:https://ipkd.cn/webs_31356.html
声明:本站提供的所有资源部分来自互联网,如果有侵犯您的版权或其他权益,请发送到邮箱:admin@ipkd.cn,我们会在看到邮件的第一时间内为您处理!